

New updated version of AsuroFlash with ISP Flash support
AsuroFlash
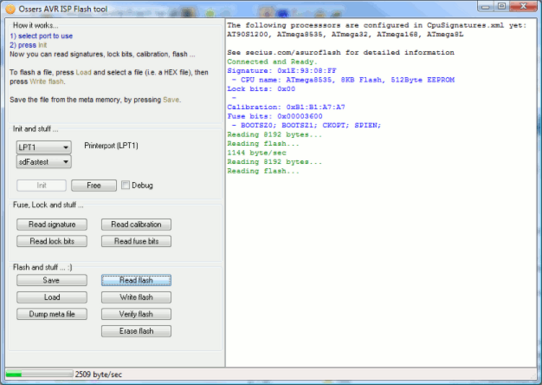
It took quite a while for this update as I am a quite busy man. There is a beautiful new driver module included with AF allowing you to easily flash the ATMEGA via its ISP interface.
What you have to do is select the ISP serial/parallel Flasher and select the dongle type in the config dialog. You can select dongles for the parallel or serial port interface.
The rest of the game, flashing though, is as easy as you are already used.
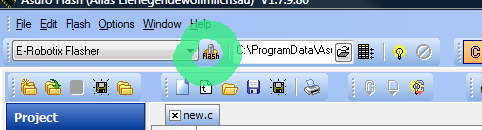
– Just click the flash button –
and you are done!
AsuroFlash — NEW tutorial videos
Asuro Flash
There are several new tutorial videos to explain certain functionalities and to provide a helping hand howto do things.
Please have a look in the Tutorial movie section.
Asuro Flash Release R09 V1.7.11.102
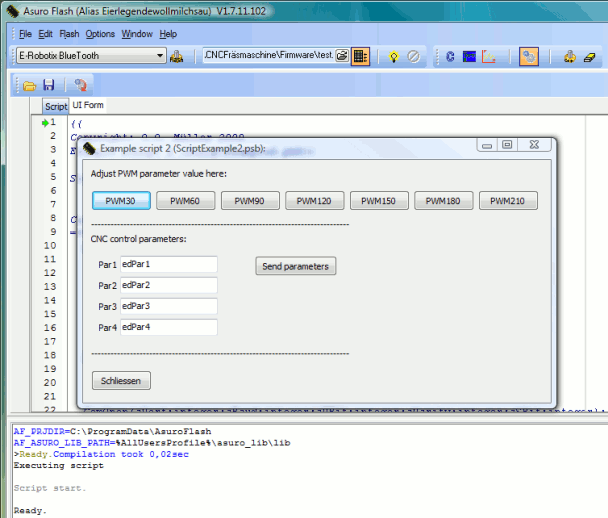
AsuroFlash has a new integrated scripting logic interface!
Click on the icon to activate the “Script View” where you will find two tabs (Tab “Script” and Tab “UI Form”).
Click on the “Load script bubble” to load ScriptExample1.psb or ScriptExample1.psb. Now click on the “Run Script” button and you can see the magic happen…..
Guess everything is quite self descriptive, but if not do not hesitate to contact me via the Roboternetz.de Thread “Alternative zu Flashnnn.exe”.
There are also some minor changes in the configuration of Term and Oszi.

Asuro Flash Release R09 V1.7.10.99 AvrIsp — a preview GUI release of comming feature in AF
AsuroFlash
I have released a new version of AF with a fix in the port enumeration logic. All ports will be shown in versions prior to V6 (os prior to WinXP though) and you do not have to edit the config manually anymore.
AF has now a new and convenient way to select the active configuration template in the C++ editor. There is a new combo in the toolbar next to the “make all” and the “make clear” button allowing direct selection of the previousely created config template.
This template will be saved with the current project as <ProjectName>.afcfg and is automatically loaded with the project. You will not have to manually select the template anymore when opening a project and can easily select another one from the existing set of templates available.
Maintenance (creation and editing) of templates is still done in the C++ config dialog.
AvrIsp
AvrIsp is a new feature study for AF still in a premature stadia which is released here as some kind of beta field test to allow everyone interested to test this ISP/PP/HVSP tool.
For the time being ISP access is available only due to the lack of PP/HVSP hardware (: I am busy building a STK500 compatible µC PCB for this purpose :) and makes use of the earlier mentioned dongles for a real COM or LPT port.
Asuro Flash Release R09 V1.7.9.97
E-Robotix IrDA fix
There is a minor fix in the IrDA communication layer. The driver did communicate via bluetooth but now IrDA was not working anymore. Yes, Murphy was right saying: “If something can go wrong, it will go wrong!”
Asuro Flash Release R09 V1.7.9.94
New version with Bluetooth support
Finally we have a new update for the AF package that supports flashing via the Bluetooth communication layer.
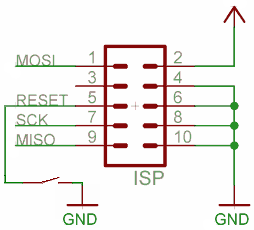
Initialization of the Bluetooth layer takes aprox. 5sec or more, until a communication channel is established, hence we use a reset button on the ISP to bring the µC back into its boot mode. Please see the last blog entry (Dec 31) to see how and where to connect the reset button.
Asuro Flash Beta 3 Release R09 V1.7.9.90
Happy New Year!!/Ein gutes Neues!!
Beta 3 release
BlueTooth communication and flashing has been tested with the E-Robotix PCB and a Belkin PC adapter. There are still some timeout issues which are not solved yet.
How do i flash via BlueTooth?
To flash via BlueTooth and the current beta version, you will need a reset button on the ISP port.
- Press the AsuroFlash “Flash Button”
- Switch on the Asuro and wait until only the yellow LED flashes on the expansion board
- Press the reset button on the ISP port
The HEX-File is getting flashed now.

Asuro Flash Beta 2 Release R09 V1.7.9.89
Happy Cristmas/Schöne Weihnachten
Beta 2 release
There are some minor changes in the configuration UI for flash drivers and the IrDA communication with the E-Robotix processor is adjusted a bit, to be shure the flashed program really gets started after it has been flashed successfully.
In the example project AT168test.aprj stood some rare characters preventing it to be loaded correctly, this is fixed as well.
Asuro Flash version to come…
What will be new in this release
With the update to come, AF will use a new integral flash driver concept, allowing a broader range of devices to be flashed.
One of the main aspects of a general aproach was to allow more than one single configuration set for each driver in AF.
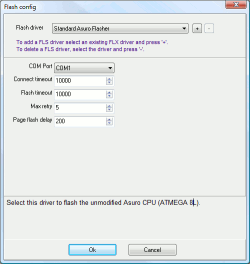
To change the current Flash driver just select the driver in question on the flash toolbar, you will flash now with the selected driver.
Change the flash driver configuration by clicking the “Flash config” button on the flash toolbar. You will be prompted with the hereunder following dialog (Pic2).
(Picture 1)
These properties where taken over from the “C++ config” dialog and reside now in this specialized flash only settings asset.
You add a custom configuration driver script (FLS) by selecting the base driver you want to inherit the new parameters and
then you click the [+] button.
Now specify a name for this driver (i.e. the name of the processor to flash) and click [OK].
The parameters of the FLS are preset with default values that you may change as needed.
In case you want to delete the FLS, just select it and press the [-] button.
(Picture 2)
How to use the different flash tools in the main window
You find now a selection box on the flash toolbar which allows easy selection of the flash logic to use. Just select the tool
you configured before and press the flash button. Thats it folks.
Asuro Flash Beta 1 Release R09 V1.7.9.86
Beta 1 release
This version is still in beta stadium for the E-Robotix driver.
The driver is tested on the default IrDA communication channel of Asuro and will be capable to flash via
Bluetooth in the final release. Feel free to test the 1.7.9.86 version via the link in the “Downloads” section
on this page.
The new installation includes new sample projects for the asuro-lib in the AsuroLibTest folder (credits to
m.a.r.v.i.n) and a new sample project for the ATMEGA168 processor in the ATMEGA168 directory. To use
the ATMEGA168 project you have to load the configuration settings for the ATMEGA168 processor in the
c++ config dialog. The setting to load is called “ATMega168.afcfg”, which will adjust the make file
propperly allowing building for this processor target.
AFSetup will install the new asuro-lib release v280rc1.
Suggestions are welcome
For suggestions please post your ideas and reports in the Roboternetz forum thread. You will find the most recent version
of AF here on this site from now on.
Happy testing!
Asuro Flash Release R08 V1.6.8.65
Changes in this release
NEW: Support for external flasher tools to flash firmware (see Config tab Flash). Because of
this new feature the port settings for the built in tool are moved to the config dialog now.
FIX: In AsuroFlash TERM mode the menu does not open on key stroke anymore.
FIX: AF_ASURO_LIB_PATH was pointing to the wrong spot by default.