
CNC Fräsmaschine - CNC Router
Das Design, die Mechanik, die Elektronik und die Software sind komplett in Eigenregie durch mich erstellt worden. Es wurden hierfür Standard ICs und Prozessoren verwandt.
Bauzeit von Anfang bis Ende ca. 8 Monate.
Mechanik:
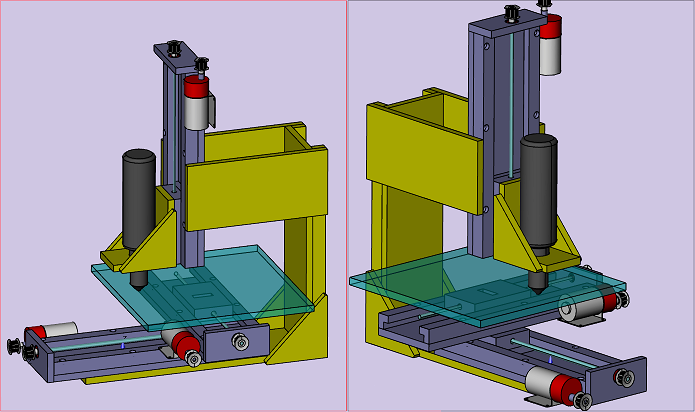
Die Maschine ist aufgebaut aus handelsüblichem 1.1730 (C45W) Flachstahl. Das Design wurde so ausgelegt, dass die Bauteile mit einem minimalen Maschinenpark erstellt werden können.
Für jede Achse wurde ein einheitliches Linearführungsmodul verwendet, woraus der Kreuzschlitten für die X-/Y-Achsen aufgebaut wurde und auch die Z-Achse.
Als Aktore dienen DC-Motore mit einem maximalen Drehmoment von 1NM die an die Servologik angeschlossen sind. Als Sensoren werden Absolut-Encoder der Firma Heidenhain verwendet mit einer maximalen Winkelteilung von 8192 Schritten. Im obigen Bild sind noch selbst gebaute Drehgeber am Achsende zu sehen, diese haben sich jedoch schnell als zu unzuverlässig erwisen.
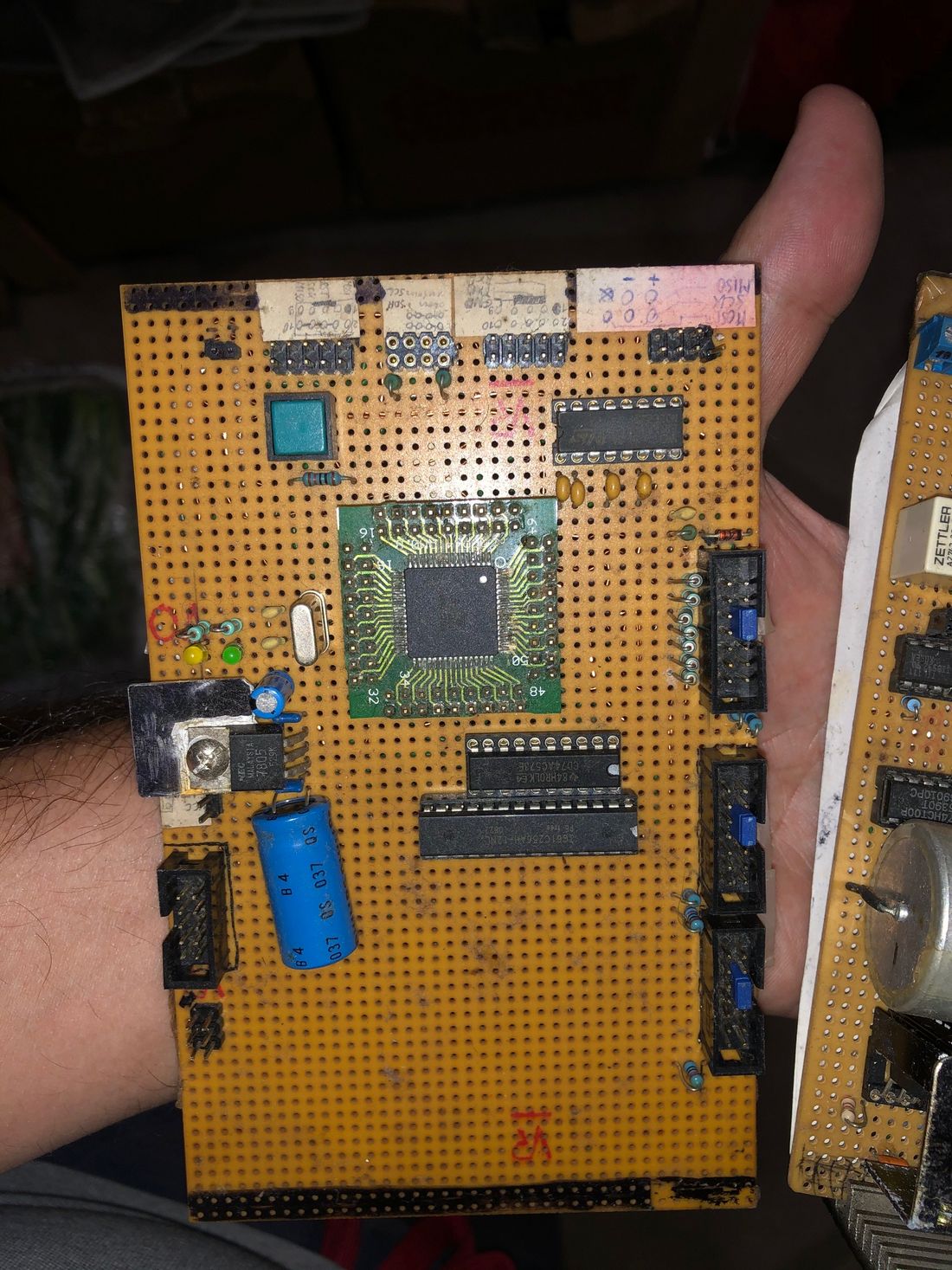
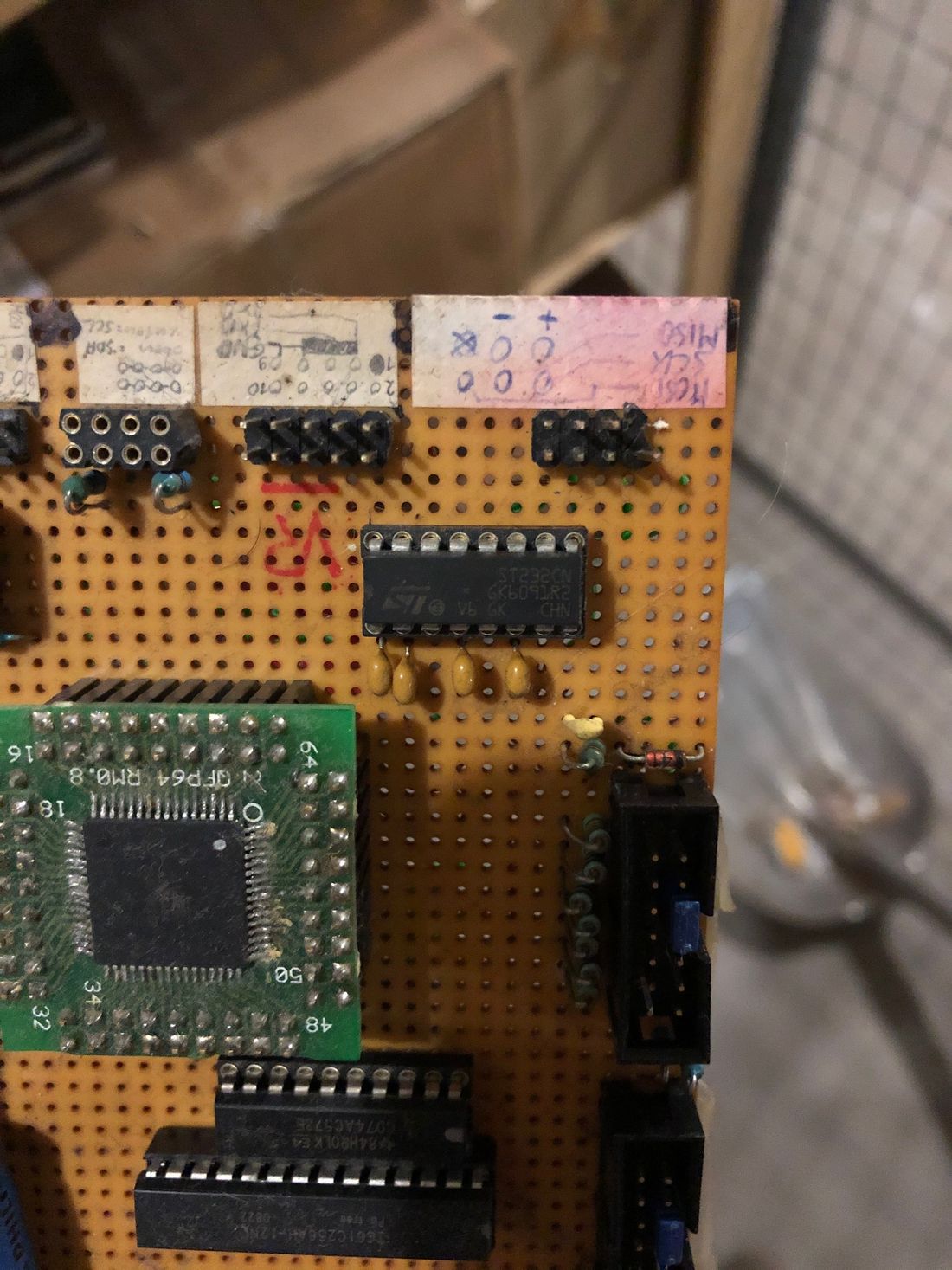
Elektronik:
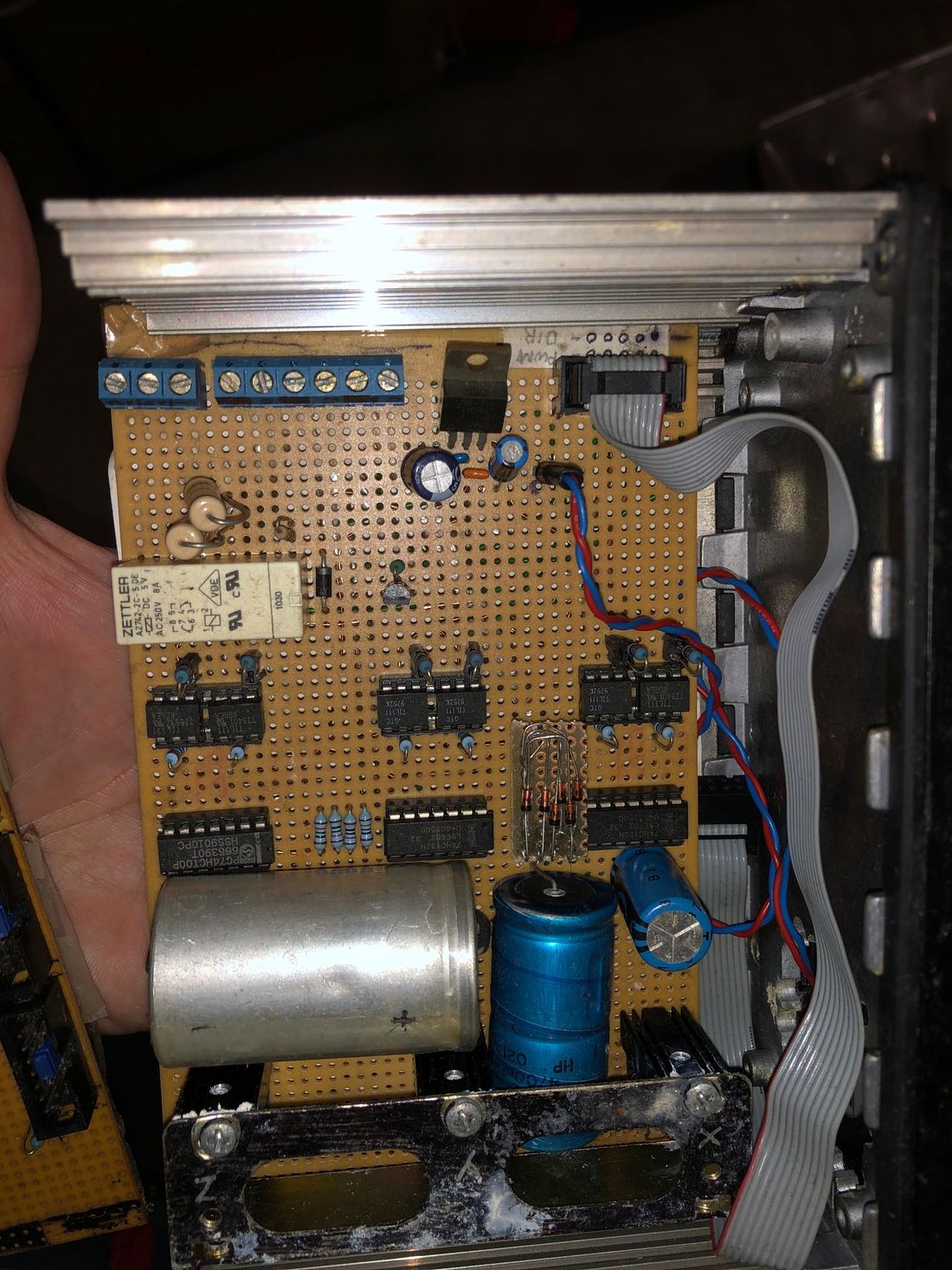
Der elektronische Aufbau besteht aus einer Servoplatine mit einer Leistungselektronik, die maximal 15V/5A pro Achse liefern kann. Die Steuerungslogik ist in einem Atmel ATmega64 mit 64K Flash und 4K SRAM realisiert und besitzt eine externe 32K Speichererweiterung. Die Achspositionen werden von einem ATmega168 Zeitsynchron ausgelesen und an den Hauptprozessor über einen SPI-Bus zur Verfügung gestellt. Die Achsregelung kann 3-Achsen simultan interpolieren und ermöglicht eine theoretisch maximale Geschwindigkeit von 1800mm/min.
Die Programmierung des NC-Integrators erfolgt mit ISO-Code, wobei mit der erwähnten Speichererweiterung bis zu 100 Programmsätze vorgehalten werden können.
Weiterführende Dokumentation:
Auf den folgenden Seiten sind Informationen zum Entwicklungsprozess der Maschine sowie die Maschine in Aktion zu sehen:
Roboternetz Tread (Forum Thread „CNC mit Gleichstrommotoren“, ca. 38.000 Hits)
Artikel mit zahlreichen Bildern
AsuroFlash IDE (Forum Thread, ca. 60.000 Hits)
Während der Entwicklung...
Im Folgenden noch ein paar Fotos und Videos während der Entwicklung der Servos und der Steuerungslogik.
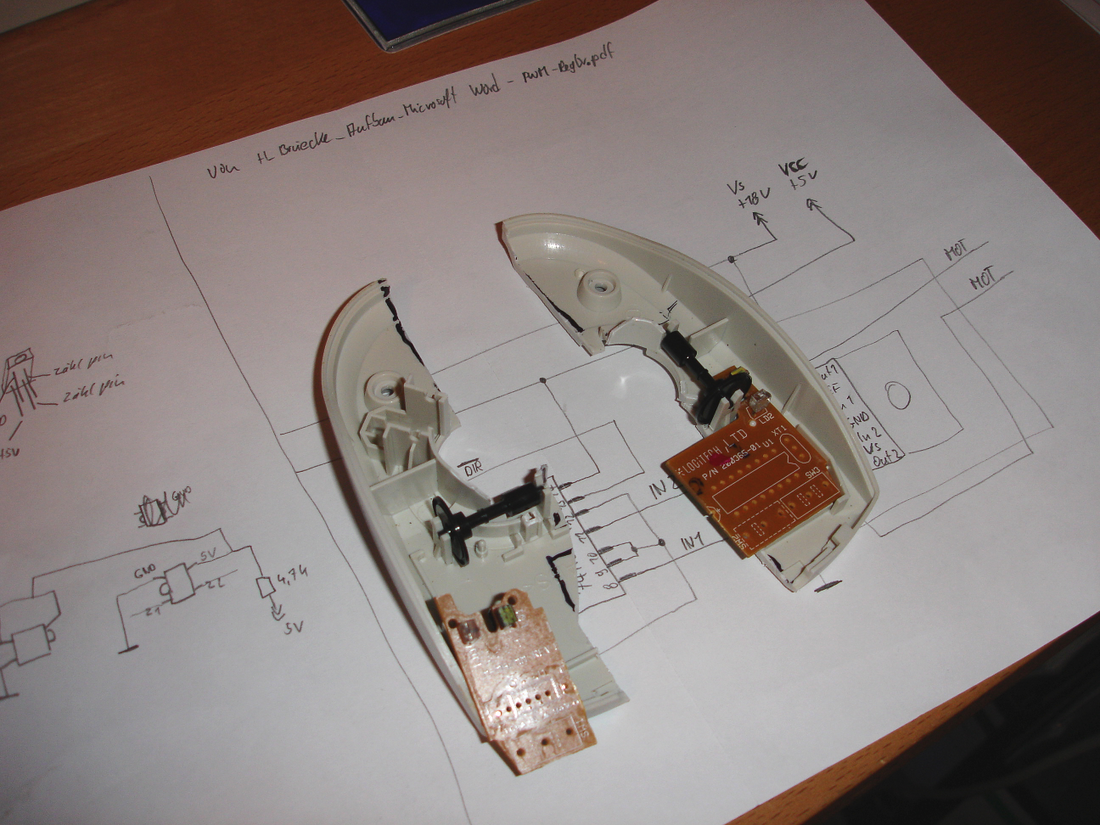
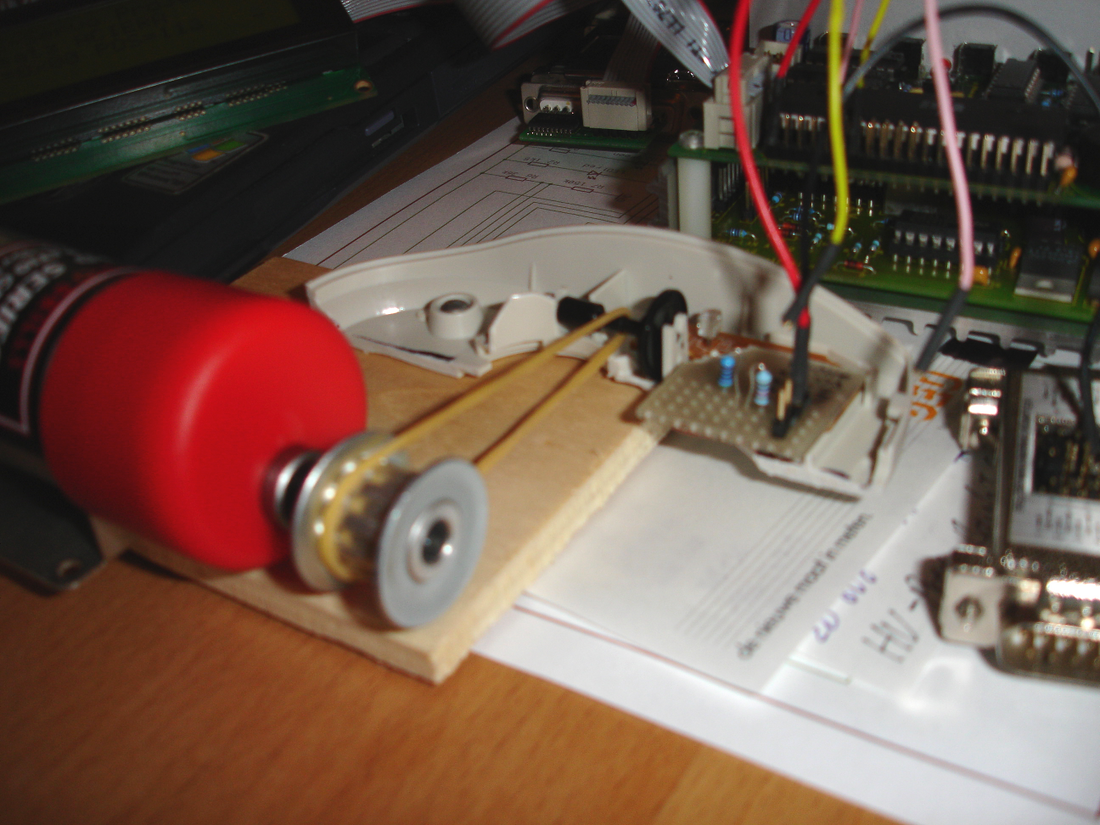
Ganz am Anfang benutzte ich die Drehgeber einer alten Maus als Drehgeber. Für die die sich jetzt fragen wo die Drehgeber in einer optischen Maus sitzen --- das war eine allte Ball-Maus mit einer Gummi ummantelten Stahlkugel als Antrieb der Positionsgeber. Schnell habe ich jedoch gemerkt das die Tastfrequenz für meine Zwecke viel zu gering ist, eine Maus wird eben im Allgemeinen recht langsam bewegt. Ich weiss nicht mehr genau bei welcher Umdrehungsfrequenz schluss war, aber mehr als 10U/sec waren es sicher nicht.
Also musste ich schauen was es so auf dem Elektronikmarkt zu kaufen gibt. Schlussendlich wurden es die Drehgeber die ihr unten in den Videos sehen könnt.
Videogallerie
Das Bedienpanel
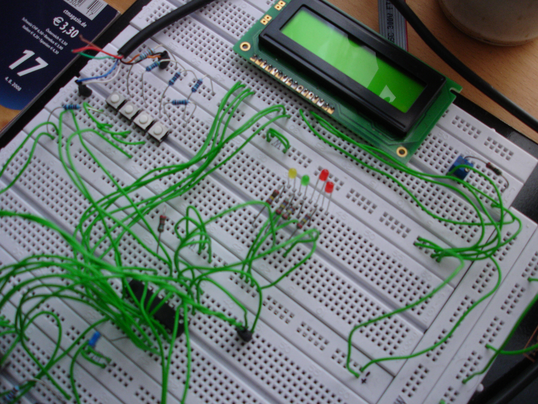
Breadboard

Mit Joystick

Im Gehäuse
